Season 1
General info on decoding MOM6 sessions
- The early sessions of these “Decoding MOM6” segments will talk through the tools that might be useful to navigate the MOM6 code
- The later sessions will dive deeper into the code itself
How to use github's search functionality to find code: MOM6 as an example.
Presenter: @dougiesquire
Searching the MOM6 code repository in the ACCESS-NRI GitHub org. Contains all of the MOM6 Fortran code used in ACCESS-OM3
Quick summary of GitHub search functionality
Pros:
- Easy and convenient
- Allows you to see how parts of the model work
Cons:
- Can only search on the default branch of the repo.
- GitHub doesn't actually index everything.
More detailed notes
- Why use the GitHub search bar?
- See how a specific piece of code is written - how is it implemented in MOM6? Need to search through the code
- Dougie’s screen: Looking at MOM6 fork on ACCESS-NRI GitHub org
- Can click on search at top or click
/to start a search - Eg search
global- Will return all files in this repo with “Global” (not case sensitive by default)
- Get the summary of the files, and can click to expand more lines of code
- Can click on the line itself and it will take you to that line in the file
- Can search on multiple terms
- Eg
Global Mean- searches all files with global or mean - Eg
“Global Mean”- search for specific phrase - Eg
“Global mean ocean salinity”- can search directly for this diagnostic- Finds where it’s registered, and can backtrack to find the code
- Eg
- Can search on patterns (regex) rather than words
- Eg search
Globalbut only at specific path:Global path:src/core
- Eg search
- Fast, powerful, easy to use
- Can share searches with people (can’t do this if you are, eg, using “grep” on Gadi terminal)
- Can click on search at top or click
- Gotchas
- Can only search on default branch
- GitHub doesn’t index everything, and opaque which code is indexed
- Eg doesn’t index vendor code, but not clear what that means
- If you search something and it seems weird that nothing is found, then this might be the main issue
Questions from the audience
- Q: Can it organize the search in order of the subroutines called?
- MOM6 docs does include schematics on subroutines that are called from specific file
- But may not be generated anymore, so may be out of date
- MOM6 docs does include schematics on subroutines that are called from specific file
- Q: Can searches be case sensitive?
- Yes, you can use regex:
/(?-i)Global/ - By default they aren’t case sensitive
- Yes, you can use regex:
- Q: What is regex?
- Language for pattern matching
- Stands for regular expression
- Lots of resources online
- Just be sure to use the correct version of regex, as there are different types
- Can click “Search syntax tips” - link at bottom of search popup in GitHub - provides quick help for lots of common regex uses
- Q: OM3 configurations are all on a branch - does that mean we’ve eliminated the ability to search through OM3 configurations?
- Yes, we can’t search OM3 configurations at the moment using this tool, because there is almost nothing on the default branch. This is definitely a limitation.
- Some parameter documentation has been moved to main branch specifically to be able to search on them
- There are other ways to search through other branches, but no examples were given
- Lots of people would like GitHub to add functionality to search on a branch other than the default, but not the case currently
More resources
Understanding GitHub Code Search syntax
Lessons learned from MOM6 code development
Presenter: @jbisits (11/12/2025).
Tip
Take-home message: when starting development, take care with which version of the MOM6 code repository you fork from.
Background
When @jbisits started work on MOM6, he went to google and found the MOM6 codebase and then made a fork of mom-ocean/MOM6 (the central consortium repository). Actually if one is looking to contribute to the MOM6 codebase from Australia, there is an access-nri/MOM6 fork. They are different forks with different branches and code bases!
How do I find out which version of MOM6 I am currently using?
Go to the OM3 configuration that you are using example and find the config.yaml following lines:
Note these lines:
modules:
use:
- /g/data/vk83/modules
load:
- access-om3/2025.08.001
Specifically note that this line access-om3/2025.08.001 highlights the Spack bundle package and git tag that is being used for MOM6 code. One can then match this tag name 2025.08.001 from the model deployment repository, this link lists all the tags, and here is the tag we are looking for: 2025.08.001 in this case.
Further information:
- MOM6 fork management for being a development node;
- OM3 build system and deployment;
- NOAA-GFDL MOM6 development guide;
- MOM6 development presentation by @marshallward.
How to find code that corresponds to a particular executable
ACCESS-NRI executables
Presenter: @jbisits.
Scope: where and how to find which model components and source code are used in an OM3 configuration that are built with Spack (this applies to all ACCESS-NRI models).
Through ACCESS-NRI release database (friendly)
The easiest way to find a related version is to use the release database. For example, suppose we are interested in model version 2025.08.001 (listed in a config.yaml file in an access-om3-configs branch or directory if you have already cloned an experiment).
We can find this model version here. Then clicking on any of the github icons for the relevant component takes you to the version of the code that was used in that release.
Directly through GitHub (more complicated)
For example looking at ACCESS-OM3, we start by looking at the configuration repository: ACCESS-NRI/access-om3-configs. Note that the main branch does not contain configurations -- you have to look at the branches.
You may wish to know what are the model components being used in a particular release? Looking at the release: release-MC_25km_jra_iaf-1.0-beta we can browse the repository at the relevant tag here.
Then in the config.yaml, see the model software version:
modules:
use:
- /g/data/vk83/modules
load:
- access-om3/2025.08.001
access-om3/2025.08.001 refers to this repository with this at the tag: 2025.08.001. To find the tags one goes to the repository --> Releases --> Tags. Here is the related access-om3 release:
https://github.com/ACCESS-NRI/ACCESS-OM3/releases/tag/2025.08.001
Browsing the related spack.yaml we can see the versions of the components in the build, for example for CICE and MOM6 we have:
access-cice:
require:
- '@CICE6.6.1-0'
- io_type=PIO
- 'fflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
- 'cflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
- 'cxxflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
access-mom6:
require:
- '@2025.07.000'
- 'fflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
- 'cflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
- 'cxxflags="-march=sapphirerapids -mtune=sapphirerapids -unroll"'
Like before, we go to the related ACCESS-NRI repositories and find the related tags, in this instance they are:
- access-CICE;
- access-mom6.
Note that the above two repositories are forks of the upstream repositories (CICE and MOM6)
For more information and other related steps: - https://access-om3-configs.access-hive.org.au/infrastructure/Building/ - https://docs.access-hive.org.au/getting_started/spack/ - https://docs.access-hive.org.au/models/build_a_model/build_source_code/ - https://docs.access-hive.org.au/models/build_a_model/create_a_prerelease/ (not shown in this tutorial but can be very simple)
COSIMA executables (e.g. mom6-panan)
Presenter: @angus-g.
Scope: where and how to find which model components and source code are used in a COSIMA configuration built with ninja.
COSIMA made executables use a different build system and way of tracking provenance. Here's an example using the mom6-panan. Going to the relevant line in the config.yaml we have: exe: /g/data/ik11/inputs/mom6/bin/symmetric_FMS2-e7d09b7
If one then goes on Gadi to the related folder, one finds:
/g/data/ik11/inputs/mom6/bin/manifest.yaml
Looking inside the manifest file we see a series of executables with information related to the major components (MOM6, SIS2, FMS) with the git hash used. The compiler flags are also included but not the more minor components. Below is an example:
exe: "symmetric_FMS2-e7d09b7"
build-date: 2022-01-20
sha256: "e7d09b7687fba4cf0693adf3c1a5f653dee312df996b99da384c64c279a53eef"
git:
- component: MOM6
ref: "93968bd8ec1a993c705846ec91c4cf33b86bc4fb"
- component: SIS2
ref: "d18605eacdd2c92b8262458fcad107c546dd080f"
- component: FMS
ref: "2d373d20af28b9d8e2cc0d0acf2334fcff457e47"
modules:
- "intel-mkl/2020.2.254"
- "python3/3.8.5"
- "netcdf/4.7.4p"
- "openmpi/4.1.2"
- "intel-compiler/2021.4.0"
keywords: [SIS2, symmetric, FMS2]
flags:
fflags: "-fno-alias -auto -safe-cray-ptr -ftz -assume byterecl -i4 -r8 -nowarn -sox -g -O2 -debug minimal -fp-model precise -qoverride-limits -xHost"
cflags: "-D__IFC -sox -g"
With the above information, one could then compile using the mom6-ninja-nci workflow written by @angus-g -- see here.
More information:
- https://github.com/angus-g/mom6-ninja-nci
- https://github.com/COSIMA/access-om2/wiki/Developers-guide (possibly out of date)
- http://github.com/cosima/access-om3 (deprecated!)
How to find what diagnostics are available in MOM6
Presenter: @dougiesquire.
If one goes to to a run directory on Gadi, then you can look at available_diags.000000. This file tells you all the available diagnostics. For each of the disagnostics it lists, it tells you:
- which diagnostics are
[used]or[Unused]; - the units;
- description of the variable;
- name of the variable;
- which grid points the diagnostic is output on.
Here's an example:
"KHMEKE_v" [Unused]
! modules: {ocean_model,ocean_model_d2}
! dimensions: xh, yq
! long_name: Meridional diffusivity of MEKE
! units: m2 s-1
! cell_methods: xh:mean yq:point
If you are using an access-om3-configs configuration, we keep up to date versions of that file alongside our configurations, here. So the available_diags.000000 file is viewed here for the release-MC_25km_jra_iaf configuration.
How to add a diagnostic
One can simply add lines to the diag_table file (example). This is not the suggested workflow, we suggest editing this yaml file: https://github.com/ACCESS-NRI/access-om3-configs/blob/dev-MC_25km_jra_iaf%2Bwombatlite/diag_table_source.yaml
This yaml file is used by make_diag_table.py (latest version: https://github.com/COSIMA/make_diag_table) to create a diag_table file specifying MOM diagnostics.
Further information on the MOM diag_table format is here:
- https://github.com/mom-ocean/MOM5/blob/master/src/shared/diag_manager/diag_table.F90
- https://mom6.readthedocs.io/en/main/api/generated/pages/Diagnostics.html
- https://www.youtube.com/watch?v=D_J8eg3G80o
How to find how and where a diagnostic is calculated
Suppose one wants to know how a field is calculated. Taking our example above (and making sure we are looking at the correct mom6 code base for our configuration) we can search the mom6 code base for the long_name, namely Meridional diffusivity of MEKE, i.e. here.
So the relevant block is
CS%id_KhMEKE_v = register_diag_field('ocean_model', 'KHMEKE_v', diag%axesCv1, Time, &
'Meridional diffusivity of MEKE', 'm2 s-1', conversion=US%L_to_m**2*US%s_to_T)
Helps us find the actual array that is being output:
if (CS%id_KhMEKE_v>0) call post_data(CS%id_KhMEKE_v, Kh_v, CS%diag)
Kh_v.
Note that changing CICE outputs involves modifying the relevant namelist: ice_in (here is an example).
Overview of MOM6 configuration (input files etc)
Presenters: @aekiss @claireyung
Configuration and input files when running MOM6 "standalone" (FMS coupler). Actually, running MOM6 in an idealised way only requires 3 input files. Here is an example taken from Claire's IS-PG-MOM6 repository:
MOM_input-- parameter settings (name defined in 'MOM_input').diag_table-- diagnostics.input.nml-- run settings (calendar, MOM_input names etc).
As this is an idealised test case, much of the configuration (forcing, geometry etc) are defined in common/MOM_input. MOM_input file typically contain only the non-default values that are needed. A full list of parameters be found in the corresponding MOM_parameter_doc.all file (example) which is generated by the model at run-time. In Claire's case, she builds "perturbations" of the base case ("common") by modifying these files; in icemount-layer-LSPR (here) you can see the symlinks to the MOM_input, diag_table, input.nml files discussed above. Except that now there is a MOM_override file (here) which overrides any settings in MOM_input.
MOM6 also has an in-built sea-ice model SIS2. An example configuratin is here. You can see that there are more configuration files (additional to MOM_input, diag_table, input.nml):
field_table;SIS_inputSIS2 input files;data_tableforcing files if using FMS coupler
ACCESS-NRI ACCESS-OM3 uses a different coupler (NUOPC) compared to the above two examples. It also uses a different "standalone" sea-ice model CICE. So whilst the MOM elements discussed above remain the same. Additional files are required for NUOPC to couple the components.
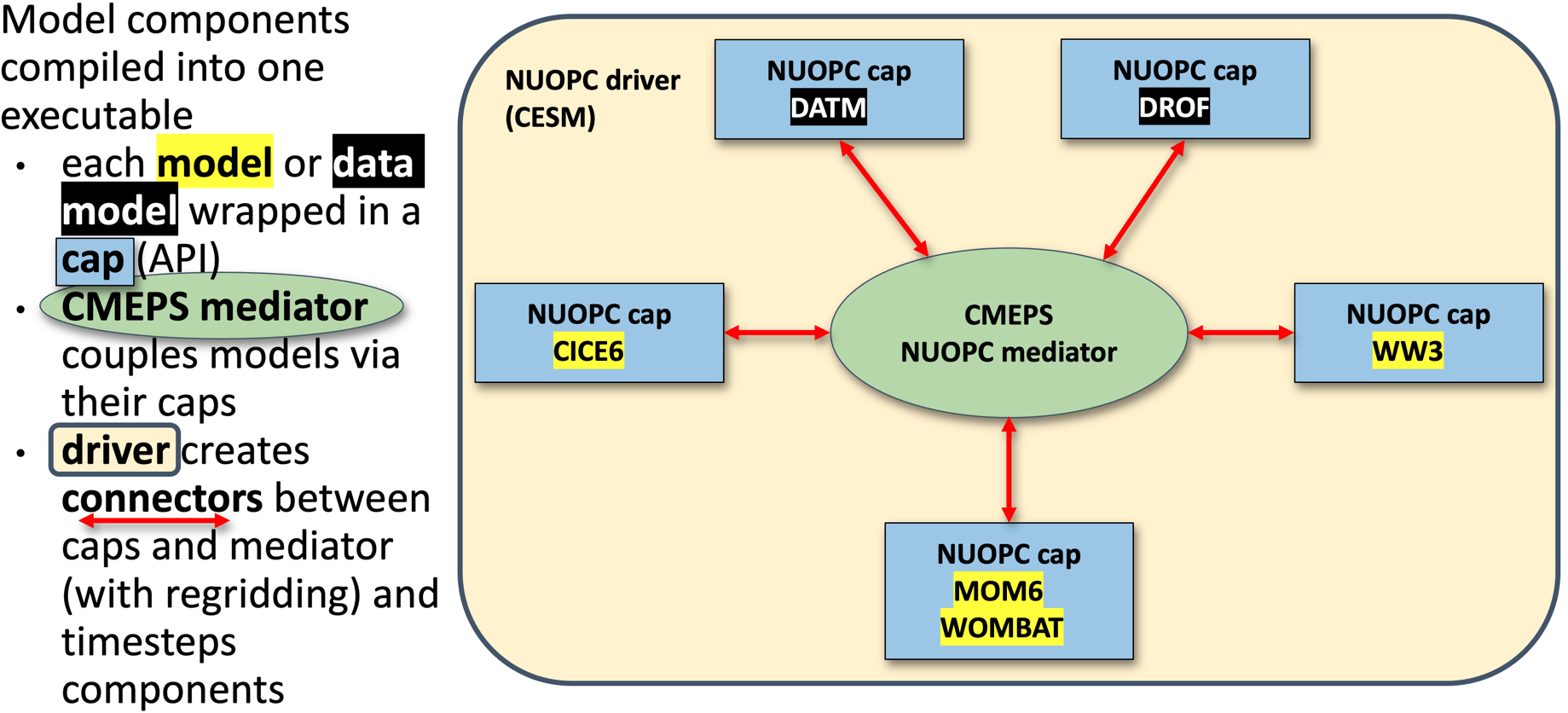 source: https://access-om3-configs.access-hive.org.au/infrastructure/Architecture/
source: https://access-om3-configs.access-hive.org.au/infrastructure/Architecture/
There's a description of the files found in a configuration here: https://access-om3-configs.access-hive.org.au/configurations/Overview/
OM3 configurations are stored here: https://github.com/acCESS-nri/access-om3-configs
Configurations that have a {dev|release}- prefix are the ones to focus on. Briefly, the configurations branches are named with the following
{dev|release}-{MODEL_COMPONENTS}_{nominal_resolution}km_{forcing_data}_{forcing_method}[+{modifier}]
Further details here.
Users are welcome to fork the access-nri configuration repository and share what changes/additions they make to configurations. ACCESS-NRI is also interested in helping support users share configurations (process outlined here). We are also keeping a list of key experiments used for development here.
Handy resources:
- ACCESS-NRI's OM3 configurations live here;
- ACCESS-NRI ACCESS-OM3 configuration files explanation;
- MOM6 runtime parameters format (input.nml, MOM_input);
- diag_table ;
- Another explanation of config files from MOM6 regional;
- AOS MOM6 tutorial 2022: Running and controlling MOM6 (e.g. ~15 minutes)
Overview of MOM6 code structure
Presenter: Paul Spence (@PaulSpence) Date: 26/03/2026.
Suggested resources in which this presentation was heavily based:
- Central MOM6 code;
- ACCESS-NRI MOM6 fork;
- Marshall Ward's talk on the structure of the MOM6 code base;
- Overview: MOM6 internals.
Thanks to @marshallward for some great content!
Looking at the mom6 directory, we have:
src/-- model code and dynamical core solvers;config_src/-- configurable components;pkg/-- code directory but written by other people (eg. TEOS10 equation of state) linked intosrc/;doc/-- documentation;ac/-- autoconf build (build the model without mkf).
See 1 minute 20 in this Overview: MOM6 internals for more details.
Config_src is particurly important. It has functions that call other model components (e.g NUOPC coupler):
config_src/drivers;solo_driver/ocean-only (example here);- NUOPC used in OM3 is an example of this.
- other drivers (e.g.
ice_solo_driverandFMS_cap)
Other configs are:
config_src/memory(e.g. symmetric, non-symmetric, static.)config/src_infraFMS1, FMS2config_src/externalBGC, data assimilation, python interface, etc.
Note: config_src/external just contains a set of dummy interfaces for external codebases that could be used with MOM6. For example there is no actual BGC code in as that lives in a different repository (here).
The src folder has model code and has directories:
core/-- main solvers such as initialisation and time-steppingparameterizations-- viscosity, mixing and diabatictracer-- tracer dynamicsALE-- vertical remappingdiagnostics-- diagnostic managementuser-- preset focing and topography
Also see framework/, equation_of_state/ etc
We then watched a little of this video (Overview: MOM6 internals) focusing on modules, starting at 10 minutes.
Module guidelines:
- "1 file per module rule".
- explicit about dependencies (improve readability).
- explicit about which functions are exposed publicly.
- has object-like programming structures.
- we don't put variables in modules. This is to ensure that we don't have global variables.
- this rightward facing arrow
!>shows what is being documents. (You'll notice there are also!<.). - Public parts of the interface are the ones that you can call elsewhere (as opposed to private ones that you can't). Here an example of public subroutines.
Here's some examples:
- MOM_diagnostics;
- MOM_diagnose_MLD;
- A simple example is the geothermal module (here).
Specifying model outputs via diag_table or make_diag_table
Presenter: @chrisb13 and @aekiss Date: 02/04/2026
Understanding the MOM6 diag_table.
Presenter: @chrisb13 (Chris Bull -- channeling Alistair Adcroft)
Resources:
- Tutorial: Running and controlling MOM6 (31 to 37 minutes);
- MOM6 diagnostics on readthedocs;
- ACCESS hive docs configuration MOM6 diagnostics;
- Dougie on adding diagnostics.
4 parts to the diag table:
- Label (title section) -- required;
- Date (title section) -- required -- reference date (year month day hour minute second) for realistic models is typically
1900 1 1 0 0 0whereas1 1 1 0 0 0is often used in idealised setups; - File section -- this section defines an arbitrary number of files that will be created. Each file is limited to a single rate of either sampling or time-averaging;
- Field section -- an arbitrary number of lines, one per diagnostic field.
In the file section, we have:
"file_name", output_freq, "output_freq_units", file_format, "time_axis_units", "time_axis_name"
plus optional extras (see MOM6 docs).
Here's an example from Claire Yung MOM6-examples-z/diag_table (link):
"GOLD Experiment" 1 1 1 0 0 0
Claire also has:
"prog", 6,"hours",1,"days","Time"
Here's how to interpret this:
- "file_name": "prog" (excludes the
.ncextension) - output_freq: 6
- "output_freq_units": "hours"
- file_format: 1 (Always set to 1, meaning netcdf.)
- "time_axis_units": "days" (units to use for the time-axis in the file. Valid values are “years”, “months”, “days”, “hours”, “minutes” or “seconds”)
- "time_axis_name": "Time" (The name of the time-axis, usually “Time”)
In the field section, we have:
"module_name", "field_name", "output_name", "file_name", "time_sampling", "reduction_method", "regional_section", packing
- module_name: Name of the component model.
- field_name: The name of the variable as registered in the model.
- output_name: The name of the variable as it will appear in the file.
- file_name: One of the files defined above in the section File section (a target).
- time_sampling: Always set to “all”.
- reduction_method: “none” means sample or snapshot. “average” or “mean” performs a time-average. “min” or “max” diagnose the minimum or maximum over each time period. Other options are also available.
- regional_section: “lon_min lon_max lat_min lat_max vert_min vert_max” limits the diagnostic to a region (“none” means global output).
- packing: Data representation in the file. 1 means double precision (64 bit real), 2 means single precision (32 bit real), 4 means packed 16-bit integers, 8 means packed 1-byte.
https://github.com/claireyung/IS-PG-MOM6/blob/3ba9863f52e075a3f588c34406d03f2b22c85fe8/MOM6-examples-z/diag_table#L22-L33
Picking up on Claire's example from earlier, we have several fields that will end up in the prog.nc file (defined here), namely:
"ocean_model","u","u","prog","all",.false.,"none",1
"ocean_model","v","v","prog","all",.false.,"none",1
"ocean_model","h","h","prog","all",.false.,"none",1
"ocean_model","temp","temp","prog","all",.false.,"none",2
"ocean_model","salt","salt","prog","all",.false.,"none",2
So taking the first one as an example:
- module_name: Name of the component model.
- field_name: we will output the variable
u. - output_name: when we output
u, we'll call itu. - file_name: target file is "prog".
- time_sampling: here it is “all” but this could be "mean" (note that you cannot mix and match within a file, nor can you have different frequencies).
- reduction_method:
.false.means no time reduction. - regional_section: “none” means no limited region.
- packing: 2 means “real*4” (single precision)
More examples here.
Also, from earlier sessions recall that the list of available diagnostics is dependent on the particular configuration of the model. For this reason the model writes a record of the available diagnostic fields at run-time into a file “available_diags", here's an example from ACCESS-OM3.
Using the COSIMA created make_diag_table workflow.
Presenter: @aekiss (Andrew Kiss)
make_diag_table is a script that generates a diag_table file from a YAML file diag_table_source.yaml.
It can be run with
python /g/data/vk83/apps/make_diag_table/make_diag_table.py
diag_table_source.yaml and writes diag_table, overwriting it if it already exists.
diag_table_source.yaml covers every feature of diag_table, so when using make_diag_table the normal practice is to only edit diag_table_source.yaml.
Why use make_diag_table? In ACCESS-OM2 and ACCESS-OM3 we often want to save one file per variable, using an informative and standardised filename convention, e.g.
ocean-2d-surface_salt-1-daily-mean-ym_1958_01.nc
ocean-2d-surface_salt-1-monthly-mean-ym_1958_01.nc
ocean-2d-surface_temp-1-daily-mean-ym_1958_01.nc
ocean-2d-surface_temp-1-monthly-mean-ym_1958_01.nc
ocean-2d-surface_temp-1-monthly-min-ym_1958_01.nc
ocean-2d-swflx-1-monthly-mean-ym_1958_01.nc
ocean-2d-tau_x-1-monthly-mean-ym_1958_01.nc
ocean-2d-tau_y-1-monthly-mean-ym_1958_01.nc
ocean-2d-temp_int_rhodz-1-monthly-mean-ym_1958_01.nc
ocean-2d-temp_xflux_adv_int_z-1-monthly-mean-ym_1958_01.nc
ocean-2d-temp_yflux_adv_int_z-1-monthly-mean-ym_1958_01.nc
ocean-2d-tx_trans_int_z-1-monthly-mean-ym_1958_01.nc
ocean-2d-wfiform-1-monthly-mean-ym_1958_01.nc
ocean-2d-wfimelt-1-monthly-mean-ym_1958_01.nc
ocean-3d-age_global-1-monthly-mean-ym_1958_01.nc
ocean-3d-buoyfreq2_wt-1-monthly-mean-ym_1958_01.nc
ocean-3d-diff_cbt_t-1-monthly-mean-ym_1958_01.nc
ocean-3d-dzt-1-monthly-mean-ym_1958_01.nc
ocean-3d-pot_rho_0-1-monthly-mean-ym_1958_01.nc
ocean-3d-pot_rho_2-1-monthly-mean-ym_1958_01.nc
ocean-3d-pot_temp-1-monthly-mean-ym_1958_01.nc
ocean-3d-salt-1-monthly-mean-ym_1958_01.nc
ocean-3d-temp-1-monthly-mean-ym_1958_01.nc
diag_table. make_diag_table solves this problem by allowing you to specify a standardised file name convention and automatically generate file names for each variable you save.
Here's an example diag_table_source.yaml. It is thoroughly commented and should be fairly intelligible.
It is in two sections:
global_defaultswhich sets the defaults used for every file and field unless overridden indefaultsin thediag_tablesection- the
file_namelist the components which are concatenated to form a standardised filename; their values are defined below diag_tablewhich defines the diagnostics to appear in the generateddiag_table- These are grouped together in categories, which are variables that have a common set of parameters (such as
reduction_methodoroutput_freq) defined indefaults(which overrideglobal_defaults)- within each category,
fieldsis a dictionary containing all the variables in that category.
- within each category,
So to add an output field to an existing category, all you need to do is add its name to the fields dictionary and run
python /g/data/vk83/apps/make_diag_table/make_diag_table.py
diag_table to have new file and field entries, with a standardised file name.
OM3 runtime output files
Presenter: @chrisb13 (Chris Bull).
Date: 09/04/2026
Abstract
Today we're focusing on understanding model output when OM3 runs succesfully. We'll be looking at key OM3 output files and ending on how to interpret diagnostics on the MOM6 C-grid. Next week Helen will discover what to do when things go wrong.
We'll focus on a recent dev MC_25km_jra_iaf-1.0-beta-5165c0f8 OM3 experiment (/g/data/ol01/outputs/access-om3-25km/MC_25km_jra_iaf-1.0-beta-5165c0f8/).
Note
Providence of this run includes:
- Model build;
- Base configuration;
- Experiment (includes the Payu run log -- has a commit for each time the model cycled / had run time changes).
Further details about these simulations is available here.
Looking at the OM3 simulation folder /home/156/aek156/payu/MC_25km_jra_iaf we have:
[gadi-login-06: MC_25km_jra_iaf-1.0-beta-5165c0f8]$ ls /home/156/aek156/payu/MC_25km_jra_iaf
025km_jra_iaf_c.e156953262 025km_jra_iaf.o156963110 025km_jra_iaf_s.o157005692 input.nml postscript.sh.o156573831 postscript.sh.o156808786
025km_jra_iaf_c.e156963108 025km_jra_iaf.o156976044 025km_jra_iaf_s.o157015747 LICENSE postscript.sh.o156580484 postscript.sh.o156819850
025km_jra_iaf_c.e156976043 025km_jra_iaf.o156985131 025km_jra_iaf_s.o157180052 manifests postscript.sh.o156591178 postscript.sh.o156837563
025km_jra_iaf_c.e156985130 025km_jra_iaf.o156993836 025km_jra_iaf_s.o157180396 metadata.yaml postscript.sh.o156606425 postscript.sh.o156849829
025km_jra_iaf_c.e156993833 025km_jra_iaf.o157001496 025km_jra_iaf_s.o157180528 MOM_input postscript.sh.o156623297 postscript.sh.o156854528
025km_jra_iaf_c.e157001495 025km_jra_iaf.o157011761 025km_jra_iaf_s.o157185544 MOM_override postscript.sh.o156629387 postscript.sh.o156859814
025km_jra_iaf_c.e157011759 025km_jra_iaf_s.e156956754 025km_jra_iaf_s.o157186682 nuopc.runconfig postscript.sh.o156679792 postscript.sh.o156872003
025km_jra_iaf_c.o156953262 025km_jra_iaf_s.e156966829 025km_jra_iaf_s.o157186970 nuopc.runseq postscript.sh.o156683733 postscript.sh.o156886215
025km_jra_iaf_c.o156963108 025km_jra_iaf_s.e156979618 access-om3.err postscript.sh.o156435401 postscript.sh.o156688095 postscript.sh.o156915954
025km_jra_iaf_c.o156976043 025km_jra_iaf_s.e156988551 access-om3.out postscript.sh.o156456265 postscript.sh.o156696134 postscript.sh.o156931182
025km_jra_iaf_c.o156985130 025km_jra_iaf_s.e156998369 archive postscript.sh.o156463585 postscript.sh.o156703797 postscript.sh.o156956753
025km_jra_iaf_c.o156993833 025km_jra_iaf_s.e157005692 CITATION.cff postscript.sh.o156464418 postscript.sh.o156707261 postscript.sh.o156966827
025km_jra_iaf_c.o157001495 025km_jra_iaf_s.e157015747 config.yaml postscript.sh.o156464466 postscript.sh.o156712962 postscript.sh.o156979617
025km_jra_iaf_c.o157011759 025km_jra_iaf_s.e157180052 datm_in postscript.sh.o156464644 postscript.sh.o156717541 postscript.sh.o156988549
025km_jra_iaf.e156942635 025km_jra_iaf_s.e157180396 datm.streams.xml postscript.sh.o156473862 postscript.sh.o156722375 postscript.sh.o156998368
025km_jra_iaf.e156953263 025km_jra_iaf_s.e157180528 diagnostic_profiles postscript.sh.o156482340 postscript.sh.o156726486 postscript.sh.o157005691
025km_jra_iaf.e156963110 025km_jra_iaf_s.e157185544 diag_table postscript.sh.o156487555 postscript.sh.o156728454 postscript.sh.o157015746
025km_jra_iaf.e156976044 025km_jra_iaf_s.e157186682 docs postscript.sh.o156490910 postscript.sh.o156729873 postscript_synced.sh
025km_jra_iaf.e156985131 025km_jra_iaf_s.e157186970 drof_in postscript.sh.o156493354 postscript.sh.o156734274 postscript_synced.sh.o157623147
025km_jra_iaf.e156993836 025km_jra_iaf_s.o156956754 drof.streams.xml postscript.sh.o156496972 postscript.sh.o156742602 postscript_synced.sh.o157623806
025km_jra_iaf.e157001496 025km_jra_iaf_s.o156966829 drv_in postscript.sh.o156511423 postscript.sh.o156748735 postscript_synced.sh.o157626155
025km_jra_iaf.e157011761 025km_jra_iaf_s.o156979618 env.yaml postscript.sh.o156530694 postscript.sh.o156752864 README.md
025km_jra_iaf.o156942635 025km_jra_iaf_s.o156988551 fd.yaml postscript.sh.o156547767 postscript.sh.o156755583 testing
025km_jra_iaf.o156953263 025km_jra_iaf_s.o156998369 ice_in postscript.sh.o156564391 postscript.sh.o156782543 work
Key files (incomplete, edited for length):
config.yamlfile that defines the experiment options;025km_jra_iaf.o*standard output for each model cycle;025km_jra_iaf.e*standard output errors;postscript.sh.o*standard output for postprocessing script;access-om3.outom3 specific errors;access-om3.errom3 specific output;manifestspayu keeping track ofexe.yaml,input.yaml,restart.yaml;docs(available_diags.000000,MOM_parameter_doc.all,MOM_parameter_doc.debugging,MOM_parameter_doc.layout,MOM_parameter_doc.short);diag_table(symlinkdiag_table->diagnostic_profiles/diag_table_standard);archivewhere all the output goes once each experiment cycle is complete (symlinkarchive->/scratch/x77/aek156/access-om3/archive/MC_25km_jra_iaf-1.0-beta-5165c0f8);worktemporary working space for the model (where to look when it crashes -- symlinkwork->/scratch/x77/aek156/access-om3/work/MC_25km_jra_iaf-1.0-beta-5165c0f8);- model configuration files:
input.nml,metadata.yaml,MOM_input,MOM_override,nuopc.runconfig,nuopc.runseq,datm_in,datm.streams.xml,drof_in,drof.streams.xml,drv_in,env.yaml,fd.yaml,ice_in.
Looking at the archive output (/g/data/ol01/outputs/access-om3-25km/MC_25km_jra_iaf-1.0-beta-5165c0f8/) we have:
[gadi-login-04: MC_25km_jra_iaf-1.0-beta-5165c0f8]$ ls
datastore.csv git-runlog output009 output020 output031 output042 output053 restart006 restart017 restart028 restart039 restart050
datastore_invalid_assets_2025-12-11-14:49:23.csv metadata.yaml output010 output021 output032 output043 output054 restart007 restart018 restart029 restart040 restart051
datastore_invalid_assets_2025-12-12-10:15:36.csv output000 output011 output022 output033 output044 output055 restart008 restart019 restart030 restart041 restart052
datastore_invalid_assets_2025-12-15-14:14:40.csv output001 output012 output023 output034 output045 output056 restart009 restart020 restart031 restart042 restart053
datastore_invalid_assets_2025-12-16-05:19:19.csv output002 output013 output024 output035 output046 pbs_logs restart010 restart021 restart032 restart043 restart054
datastore_invalid_assets_2025-12-17-13:33:13.csv output003 output014 output025 output036 output047 restart000 restart011 restart022 restart033 restart044 restart055
datastore_invalid_assets_2025-12-18-11:17:27.csv output004 output015 output026 output037 output048 restart001 restart012 restart023 restart034 restart045 restart056
datastore_invalid_assets_2025-12-19-08:47:53.csv output005 output016 output027 output038 output049 restart002 restart013 restart024 restart035 restart046
datastore_invalid_assets_2026-01-08-14:43:25.csv output006 output017 output028 output039 output050 restart003 restart014 restart025 restart036 restart047
datastore.json output007 output018 output029 output040 output051 restart004 restart015 restart026 restart037 restart048
error_logs output008 output019 output030 output041 output052 restart005 restart016 restart027 restart038 restart049
Note:
- This is where the output is "archived" to;
- each
output0*is a cycle of output (yearly); - each
restart0*contains restart files; - file
datastore.jsonis an ESMdatastore.
Looking at output030, we have (trimmed for readability):
[gadi-login-06: output030]$ ls -1
access-om3.cice.1day.mean.1988-01.nc
access-om3.cice.1day.mean.1988-02.nc
access-om3.cice.1day.mean.1988-03.nc
access-om3.cice.static.nc
access-om3.err
access-om3.mom6.2d.tob.1day.mean.1988.nc
access-om3.mom6.2d.tos.1day.mean.1988.nc
access-om3.mom6.2d.tos.1mon.max.1988.nc
access-om3.mom6.2d.tos.1mon.min.1988.nc
access-om3.mom6.2d.umo_2d.1mon.mean.1988.nc
access-om3.mom6.2d.vmo_2d.1mon.mean.1988.nc
access-om3.mom6.2d.wfo.1mon.mean.1988.nc
access-om3.mom6.2d.zos.1mon.max.1988.nc
access-om3.mom6.2d.zos.1mon.mean.1988.nc
access-om3.mom6.2d.zos.1mon.min.1988.nc
access-om3.mom6.2d.zossq.1mon.mean.1988.nc
access-om3.mom6.3d.agessc.z.1mon.mean.1988.nc
access-om3.mom6.3d.diftrblo.1mon.mean.1988.nc
access-om3.mom6.3d.diftrelo.1mon.mean.1988.nc
access-om3.mom6.3d.e.1mon.mean.1988.nc
access-om3.mom6.3d.e.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.GM_sfn_y.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.uhGM.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.umo.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.uo.z.1mon.mean.1988.nc
access-om3.mom6.3d.vhGM.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.vmo.rho2.1mon.mean.1988.nc
access-om3.mom6.3d.vo.z.1mon.mean.1988.nc
access-om3.mom6.geometry.nc
access-om3.mom6.scalar.1day.snap.1988.nc
access-om3.mom6.static.nc
access-om3.out
available_diags.000000
config.yaml
datm_in
datm.streams.xml
diag_table
drof_in
drof.streams.xml
drv_in
env.yaml
fd.yaml
ice_in
input.nml
log
logfile.000000.out
manifests
MOM_IC_1.nc
MOM_IC_2.nc
MOM_IC_3.nc
MOM_IC.nc
MOM_input
MOM_override
MOM_parameter_doc.all
MOM_parameter_doc.debugging
MOM_parameter_doc.layout
MOM_parameter_doc.short
nuopc.runconfig
nuopc.runseq
ocean.stats
ocean.stats.nc
Vertical_coordinate.nc
warnfile.000000.out
We'll focus on interpreting the diagnostic output.
Taking access-om3.mom6.3d.uo.z.1mon.mean.1988.nc as an example, this file consists of monthly time-mean zonal velocities for 1988. Looking at the structure of the file (edited for clarity):
[cyb561.gadi-login-06: output030]$ ncdump -c access-om3.mom6.3d.uo.z.1mon.mean.1988.nc | head -n100
netcdf access-om3.mom6.3d.uo.z.1mon.mean.1988 {
dimensions:
xq = 1441 ;
yh = 1152 ;
z_l = 75 ;
z_i = 76 ;
time = UNLIMITED ; // (12 currently)
nv = 2 ;
variables:
float uo(time, z_l, yh, xq) ;
uo:_FillValue = 1.e+20f ;
uo:missing_value = 1.e+20f ;
uo:units = "m s-1" ;
uo:long_name = "Sea Water X Velocity" ;
uo:cell_methods = "z_l:mean yh:mean xq:point time: mean" ;
uo:time_avg_info = "average_T1,average_T2,average_DT" ;
uo:standard_name = "sea_water_x_velocity" ;
uo:interp_method = "none" ;
double xq(xq) ;
xq:units = "degrees_east" ;
xq:long_name = "q point nominal longitude" ;
xq:axis = "X" ;
double yh(yh) ;
yh:units = "degrees_north" ;
yh:long_name = "h point nominal latitude" ;
yh:axis = "Y" ;
double z_l(z_l) ;
z_l:units = "meters" ;
z_l:long_name = "Depth at cell center" ;
z_l:axis = "Z" ;
z_l:positive = "down" ;
z_l:edges = "z_i" ;
double time(time) ;
time:units = "days since 1900-01-01 00:00:00" ;
time:long_name = "time" ;
time:axis = "T" ;
time:calendar_type = "GREGORIAN" ;
time:calendar = "gregorian" ;
time:bounds = "time_bnds" ;
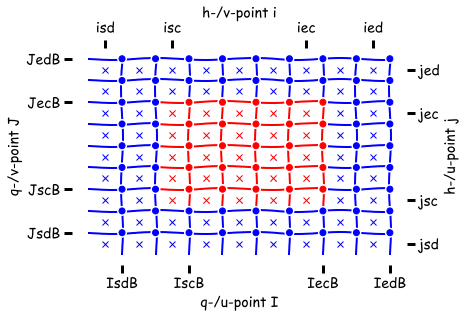
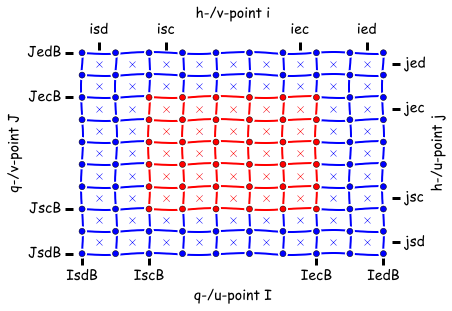
We need to understand how MOM6's grid is defined.
Here are two different ways to visualise the C-grid that is used by MOM6.
- The first way shows both the horizontal and vertical staggering. Note that the tracers, velocities and vorticity points are horizontally and vertically staggered:

Image from the pycomodo project.
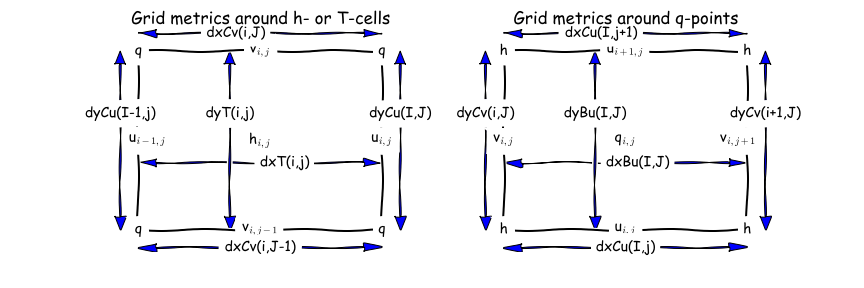
- The second grid visualisation, focuses on the horizontal, and uses the the notation that is used in the MOM6 documentation:
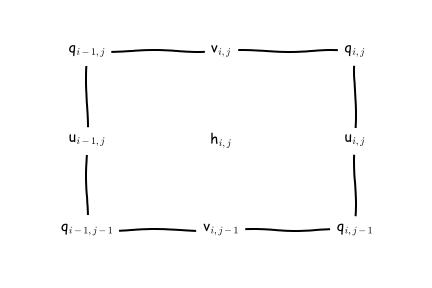
Image from the MOM6 RTD.
We can find complete information about the MOM6 grid in this file access-om3.mom6.static.nc. This is very important when you want to do offline model diagnostics accurately (e.g. fluxes across sections, calculate gradients, integrals etc).
The file has a lot of useful information, so we'll look at it in chunks.
[gadi-login-06: output030]$ ncdump -c access-om3.mom6.static.nc | head -n220
netcdf access-om3.mom6.static {
dimensions:
xh = 1440 ;
yh = 1152 ;
time = UNLIMITED ; // (1 currently)
xq = 1441 ;
yq = 1153 ;
variables:
double xh(xh) ;
xh:units = "degrees_east" ;
xh:long_name = "h point nominal longitude" ;
xh:axis = "X" ;
double yh(yh) ;
yh:units = "degrees_north" ;
yh:long_name = "h point nominal latitude" ;
yh:axis = "Y" ;
double xq(xq) ;
xq:units = "degrees_east" ;
xq:long_name = "q point nominal longitude" ;
xq:axis = "X" ;
double yq(yq) ;
yq:units = "degrees_north" ;
yq:long_name = "q point nominal latitude" ;
yq:axis = "Y" ;
Think of the above as "indices" for the Tracer and velocity points. Once, we have these we can then define latitude (geolat_*) and longitude (geolon_*) anywhere on the C-grid...
double geolat_c(yq, xq) ;
geolat_c:_FillValue = 1.e+20 ;
geolat_c:missing_value = 1.e+20 ;
geolat_c:units = "degrees_north" ;
geolat_c:long_name = "Latitude of corner (Bu) points" ;
geolat_c:cell_methods = "time: point" ;
geolat_c:interp_method = "none" ;
double geolat(yh, xh) ;
geolat:_FillValue = 1.e+20 ;
geolat:missing_value = 1.e+20 ;
geolat:units = "degrees_north" ;
geolat:long_name = "Latitude of tracer (T) points" ;
geolat:cell_methods = "time: point" ;
double geolat_u(yh, xq) ;
geolat_u:_FillValue = 1.e+20 ;
geolat_u:missing_value = 1.e+20 ;
geolat_u:units = "degrees_north" ;
geolat_u:long_name = "Latitude of zonal velocity (Cu) points" ;
geolat_u:cell_methods = "time: point" ;
geolat_u:interp_method = "none" ;
double geolat_v(yq, xh) ;
geolat_v:_FillValue = 1.e+20 ;
geolat_v:missing_value = 1.e+20 ;
geolat_v:units = "degrees_north" ;
geolat_v:long_name = "Latitude of meridional velocity (Cv) points" ;
geolat_v:cell_methods = "time: point" ;
geolat_v:interp_method = "none" ;
double geolon_c(yq, xq) ;
geolon_c:_FillValue = 1.e+20 ;
geolon_c:missing_value = 1.e+20 ;
geolon_c:units = "degrees_east" ;
geolon_c:long_name = "Longitude of corner (Bu) points" ;
geolon_c:cell_methods = "time: point" ;
geolon_c:interp_method = "none" ;
double geolon(yh, xh) ;
geolon:_FillValue = 1.e+20 ;
geolon:missing_value = 1.e+20 ;
geolon:units = "degrees_east" ;
geolon:long_name = "Longitude of tracer (T) points" ;
geolon:cell_methods = "time: point" ;
double geolon_u(yh, xq) ;
geolon_u:_FillValue = 1.e+20 ;
geolon_u:missing_value = 1.e+20 ;
geolon_u:units = "degrees_east" ;
geolon_u:long_name = "Longitude of zonal velocity (Cu) points" ;
geolon_u:cell_methods = "time: point" ;
geolon_u:interp_method = "none" ;
double geolon_v(yq, xh) ;
geolon_v:_FillValue = 1.e+20 ;
geolon_v:missing_value = 1.e+20 ;
geolon_v:units = "degrees_east" ;
geolon_v:long_name = "Longitude of meridional velocity (Cv) points" ;
geolon_v:cell_methods = "time: point" ;
geolon_v:interp_method = "none" ;
The areacello variables (e.g. calculating fluxes through a face):
double areacello(yh, xh) ;
areacello:_FillValue = 1.e+20 ;
areacello:missing_value = 1.e+20 ;
areacello:units = "m2" ;
areacello:long_name = "Ocean Grid-Cell Area" ;
areacello:cell_methods = "area:sum yh:sum xh:sum time: point" ;
areacello:standard_name = "cell_area" ;
double areacello_cu(yh, xq) ;
areacello_cu:_FillValue = 1.e+20 ;
areacello_cu:missing_value = 1.e+20 ;
areacello_cu:units = "m2" ;
areacello_cu:long_name = "Ocean Grid-Cell Area" ;
areacello_cu:cell_methods = "area:sum yh:sum xq:sum time: point" ;
areacello_cu:standard_name = "cell_area" ;
double areacello_cv(yq, xh) ;
areacello_cv:_FillValue = 1.e+20 ;
areacello_cv:missing_value = 1.e+20 ;
areacello_cv:units = "m2" ;
areacello_cv:long_name = "Ocean Grid-Cell Area" ;
areacello_cv:cell_methods = "area:sum yq:sum xh:sum time: point" ;
areacello_cv:standard_name = "cell_area" ;
double areacello_bu(yq, xq) ;
areacello_bu:_FillValue = 1.e+20 ;
areacello_bu:missing_value = 1.e+20 ;
areacello_bu:units = "m2" ;
areacello_bu:long_name = "Ocean Grid-Cell Area" ;
areacello_bu:cell_methods = "area:sum yq:sum xq:sum time: point" ;
areacello_bu:standard_name = "cell_area" ;
The dx* and dy* variables (e.g. calculating fluxes through a section, calculating gradients, integrals etc):
double dxt(yh, xh) ;
dxt:_FillValue = 1.e+20 ;
dxt:missing_value = 1.e+20 ;
dxt:units = "m" ;
dxt:long_name = "Delta(x) at thickness/tracer points (meter)" ;
dxt:cell_methods = "time: point" ;
dxt:interp_method = "none" ;
double dyt(yh, xh) ;
dyt:_FillValue = 1.e+20 ;
dyt:missing_value = 1.e+20 ;
dyt:units = "m" ;
dyt:long_name = "Delta(y) at thickness/tracer points (meter)" ;
dyt:cell_methods = "time: point" ;
dyt:interp_method = "none" ;
double dxCu(yh, xq) ;
dxCu:_FillValue = 1.e+20 ;
dxCu:missing_value = 1.e+20 ;
dxCu:units = "m" ;
dxCu:long_name = "Delta(x) at u points (meter)" ;
dxCu:cell_methods = "time: point" ;
dxCu:interp_method = "none" ;
double dyCu(yh, xq) ;
dyCu:_FillValue = 1.e+20 ;
dyCu:missing_value = 1.e+20 ;
dyCu:units = "m" ;
dyCu:long_name = "Delta(y) at u points (meter)" ;
dyCu:cell_methods = "time: point" ;
dyCu:interp_method = "none" ;
double dxCv(yq, xh) ;
dxCv:_FillValue = 1.e+20 ;
dxCv:missing_value = 1.e+20 ;
dxCv:units = "m" ;
dxCv:long_name = "Delta(x) at v points (meter)" ;
dxCv:cell_methods = "time: point" ;
dxCv:interp_method = "none" ;
double dyCv(yq, xh) ;
dyCv:_FillValue = 1.e+20 ;
dyCv:missing_value = 1.e+20 ;
dyCv:units = "m" ;
dyCv:long_name = "Delta(y) at v points (meter)" ;
dyCv:cell_methods = "time: point" ;
dyCv:interp_method = "none" ;
double dyCuo(yh, xq) ;
dyCuo:_FillValue = 1.e+20 ;
dyCuo:missing_value = 1.e+20 ;
dyCuo:units = "m" ;
dyCuo:long_name = "Open meridional grid spacing at u points (meter)" ;
dyCuo:cell_methods = "time: point" ;
dyCuo:interp_method = "none" ;
double dxCvo(yq, xh) ;
dxCvo:_FillValue = 1.e+20 ;
dxCvo:missing_value = 1.e+20 ;
dxCvo:units = "m" ;
dxCvo:long_name = "Open zonal grid spacing at v points (meter)" ;
dxCvo:cell_methods = "time: point" ;
dxCvo:interp_method = "none" ;
double deptho(yh, xh) ;
deptho:_FillValue = 1.e+20 ;
deptho:missing_value = 1.e+20 ;
deptho:units = "m" ;
deptho:long_name = "Sea Floor Depth" ;
deptho:cell_methods = "area:mean yh:mean xh:mean time: point" ;
deptho:cell_measures = "area: areacello" ;
deptho:standard_name = "sea_floor_depth_below_geoid" ;
Further information:
- Discrete Horizontal and Vertical Grids on MOM6 docs;
- Lecture: MOM6 spatial discretizations;
- Tutorial: Analyzing MOM6.
Interpreting OM3 maxCFL, truncations, warnings, errors.
Presenter: @helenmacdonald Date: 16/04/2026
Part 1 How do I know I have an error?
When your simulation is running, your control directory will have links to an archive and work directory along with a access-om3.out and access-om3.err file:
archive -> /scratch/project/user/access-om3/archive/my-buggy-run
work -> /scratch/project/user/access-om3/work/my-buggy-run
access-om3.out
access-om3.err
qstat), payu will remove the work directory (after copying files into the archive directory) and move access-om3.out and access-om3.err into the archive directory. If your simulation has finished and you can still see some or all of these files/links in the control directory, or the expected output is missing from the archive directory it is likely that an error has occurred.
There are a few places to check for error messages, starting with these output files
access-om3.out
access-om3.err
1deg_jra55do_ia.e158765798
1deg_jra55do_ia.o158765798
jobname.ejobid and jobname.ojobid.
The error messagees are usually near the bottom of the files but can be a bit cryptic so also scroll up to see if there are some warnings about, e.g., a missing file.
It can also be helpful to look at log files in your work directory:
work/logfile.*.out
work/log/*
work/warnfile.000000.out
work/logfile.*.out. Don’t look at them all, just pick one.
We can’t go through every error message that could arise but you should first try to classify your error:
- is it repeatable? (does it happen again if you do payu sweep; payu run?)
- if not, it's likely a transient error, eg due to a brief hardware failure on Gadi. You can even set up payu to automatically sweep and re-run if a particular error occurs.
- is it associated with a particular model component, or payu?
- does it happen in the initialisation, or after several timesteps?
A few more tips for debugging:
- Look at whatever the last change was, often this is what caused the error.
- Try putting the error message into google, or an AI agent
- Search the hive forum
- Check Gadi status just in case the issue is external
- Ask a friend or post in the hive forum
- Search through the code-base for the error message or for key words
- Go back to a last working copy and slowly implement your changes, checking for errors along the way
If all of these fail, there is the option to use a debugger
Note: If you struggled to find an answer, other people will as well so please consider posting the issue and solution to the hive forum
Part 2 Truncation errors
See here for more detiled notes on understanding truncation errors. A common error is when the model goes numerically unstable, creating large velocities. MOM6 deals with these by truncating them (artificially setting them back to a realistic number). When MOM6 does this too many times it will end the simulation early with this error message:
Ocean velocity has been truncated too many times
The following parameters in MOM_input control this process.
U_TRUNC_FILE = "U_velocity_truncations" ! default = ""
! The absolute path to a file into which the accelerations leading to zonal
! velocity truncations are written. Undefine this for efficiency if this
! diagnostic is not needed.
V_TRUNC_FILE = "V_velocity_truncations" ! default = ""
! The absolute path to a file into which the accelerations leading to meridional
! velocity truncations are written. Undefine this for efficiency if this
! diagnostic is not needed.
MAXVEL = 6.0 ! [m s-1] default = 3.0E+08
! The maximum velocity allowed before the velocity components are truncated.
!CFL_TRUNCATE_RAMP_TIME = 7200.0 ! [s] default = 0.0
! The time over which the CFL truncation value is ramped up at the beginning of
! the run.
MAXTRUNC = 100000 ! [truncations save_interval-1] default = 0
! The run will be stopped, and the day set to a very large value if the velocity
! is truncated more than MAXTRUNC times between energy saves. Set MAXTRUNC to 0
! to stop if there is any truncation of velocities.
CFL_BASED_TRUNCATIONS = True ! [Boolean] default = True
! If true, base truncations on the CFL number, and not an absolute speed.
CFL_TRUNCATE = 0.5 ! [nondim] default = 0.5
! The value of the CFL number that will cause velocity components to be
! truncated; instability can occur past 0.5.
CFL_REPORT = 0.5 ! [nondim] default = 0.5
! The value of the CFL number that causes accelerations to be reported; the
! default is CFL_TRUNCATE.
CFL_TRUNCATE_RAMP_TIME = 7200.0 ! [s] default = 0.0
! The time over which the CFL truncation value is ramped up at the beginning of
! the run.
CFL_TRUNCATE_START = 0.0 ! [nondim] default = 0.0
MAXTRUNC usually doesn’t make the problem go away. In particular, when an issue comes up, it affects other variables such as sea surface elevation which can crash the simulation before you reach MAXTRUNC. As such it is worth looking for truncation errors if you are getting these sorts of errors:
WARNING from PE 1170: Extreme surface sfc_state detected
WARNING from PE 879: btstep: eta has dropped below bathyT
If your velocity is being truncated (regardless of if you reach MAXTRUNC) then you should also have one or both of these files (or similar):
work/V_velocity_truncations
work/U_velocity_truncations
These truncation files contain information on where and when the truncations occur and there is detailed information on how to interpret the files here.
There is a notebook to help investigate the location and timing of the truncation errors here.
Common ways to fix the issue are to:
- decrease the timestep and
- modify the bathymetry to remove “lumps” and “bumps” in the coastline and bathymetry that might be contributing to the instability.
For 1: you can decrease the timestep in MOM_input by reducing parameters DT and DT_THERM. Changing timestep in ACCESS-OM3 is more involved due to the coupling - see here. Make sure your coupling timestep (set in nuopc.runseq) is divisable by DT and DT_THERM.
For 2: bathymetry modification has a few potential pitfals, including the need to recreate other files (e.g. the mesh files). There are some tools to help with bathymetry modification here. ACCESS-OM3 users are advised to start with a clone of make_om3_topo and check out the commit that created the topog.nc files used in their configuration. The commit is in the metadata of topog.nc - 'ncdump -h /path/to/file/topog.nc(where/path/to/file/is documented inconfig.yaml) will get you this information. Themake_om3_topo` script goes through the steps needed to create the topography, including bathymetry modifications already performed. This workflow will also document any new changes to the bathymetry if you need to revisit this at a later date.
There is not a good universal rule to identify the “lumps and bumps”. Sometimes it is obvious but sometimes it isn’t and it can be helpful to ask some friends for their opinions.
Part 1: How to contribute code back to MOM6
Date: 23/04/2026.
Presenter: Josef Bisits (@jbisits).
Benefits:
- allows for online calculation (very precise);
- could be of enduring value to the community;
- it will get maintained for you once you've contributed it!
Background: Joey did this once recently and will walk us through the steps. Today, he'll focus on diagnostics as they are a friendly place to start. A related issue is how to edit the source code and then build the model, this will be the focus of a later session. In general, one needs to
find the relevant model code --> do a calculation --> output it
Important to be aware that there are two different types of memory non-symmetric and symmetric in MOM6. This influences where your data lives on the grid:
| Non-symmetric | Symmetric |
|---|---|
 |
 |
- the crosses (
x) are h points - faces are the
uandvpoints
Another consideration is that MOM6 has internal dimensions (non-dimensionalised) and typical external units. These are documented throughout the source cod, for example:
[CU H L2 T-1 --> conc m3 s_1 or conc kg s-1]
In the above, CU is the concentration of any tracer in internal dimensions which, once transformed, becomes the physical concentration unit; see for here. For example, the internal dimension of temperature is CU but the output conc will be degrees Celsius. Additionally, in the above H is the layer thickness, L is the horizontal length and T is time which are transformed to conc m3 s-1 when the model output is saved.
One will see these kinds of statements in the headers of subroutines:
subroutine calculate_diagnostic_fields(u, v, h, uh, vh, tv, ADp, CDp, p_surf, &
dt, diag_pre_sync, G, GV, US, CS)
type(ocean_grid_type), intent(inout) :: G !< The ocean's grid structure.
type(verticalGrid_type), intent(in) :: GV !< The ocean's vertical grid structure.
type(unit_scale_type), intent(in) :: US !< A dimensional unit scaling type
real, dimension(SZIB_(G),SZJ_(G),SZK_(GV)), &
intent(in) :: u !< The zonal velocity [L T-1 ~> m s-1].
One then does their calculation. See here for a demonstration of a subroutine that defines dimensions of inputs and outputs and carries out a calculation for an output diagnostic.
Having defined a diagnostic, for the model to output it a conversion needs to be specified so that the output data is in the correct units. The conversion is specified in when the diagnostic is registered, see the registering of the zonal mass transport which converts the internal units into kgs^-1 for output.
@jbisits has been working on a contribution on his own fork:
- https://github.com/jbisits/MOM6/tree/jib/numerical-mixing
Once one is happy with a code contribution. It is then possible, via the ACCESS-NRI MOM6 fork, to go through a process by which it gets accepted into the "upstream" mom-ocean codebase. We will cover this process in more detail in a future presentation.
Further background is available:
- Marshall Ward (@marshallward) on:
- Contributing to MOM6 video.
- ACCESS-NRI on MOM6 node PR testing.
- ACCESS-NRI MOM6 branch management (relevant for making contributions).
Part 2: How to contribute code back to MOM6
Date: 30/04/2026.
Presenter: Dougie Squire (@dougiesquire).
 Schematic of MOM6 consortium with it's 8 development nodes.
Schematic of MOM6 consortium with it's 8 development nodes.
MOM6 Consortium
- ACCESS-NRI is a member of the MOM6 consortium.
- Contributions start at the outside and work their way in. All code contributions (preferably) go through development nodes.
- All members review/test contributions to the "official" codebase (
mom-ocean/MOM6:main). - ACCESS-OM3 is built from the ACCESS-NRI fork.
For example, Joey Bisits is working in his own fork of ACCESS-NRI's MOM6 fork, a PR will then merge Joey's code into our organisation's fork -- as part of the PR, ACCESS-NRI will do some testing. Collating several of these kinds of contributions together, we will eventually put a PR together to mom-ocean/MOM6:main. This will then be tested by all the development nodes and they all separately need to approve it before it will be merged into mom-ocean/MOM6:main. Further details of the tests ACCESS-NRI does is available here.
At times, the ACCESS-NRI fork is out of step with mom-ocean/MOM6:main, this occurs across all the development nodes. For example, currently on our fork, on the 2026.01 branch, it is "14 commits ahead of and 18 commits behind mom-ocean/MOM6:main".
What does this mean for me (a community person)?
- Pull requests should be made to
ACCESS-NRI/MOM6 - In practice, we prefer Pull Requests are made from branches in
ACCESS-NRI/MOM6(it makes testing easier as our infrastructure is set up there), rather than people's own personal fork. - We want to help the community contribute code. Open an issue in
ACCESS-NRI/MOM6if you are thinking about contributing something and we can chat it over and give people write access to the repository. - It may take some time for your code to reach
mom-ocean/MOM6. - We offer technical support for people's work.
Audience question: how does one know that the thing they're working on not being worked on elsewhere?
- We can ask at the bi-weekly MOM6 developer meetings
- Look at
mom-oceanPRs and development occurring at other development nodes (e.g. gfdl) - Open an issue on the
ACCESS-NRI/MOM6fork to discuss -- it's okay to do this earlier whilst you are still working out a plan.
Further information is available:
- Marshall Ward (@marshallward) on:
- Contributing to MOM6 video.
- ACCESS-NRI MOM6 branch management (relevant for making contributions).